3D Coordinates X Y Z
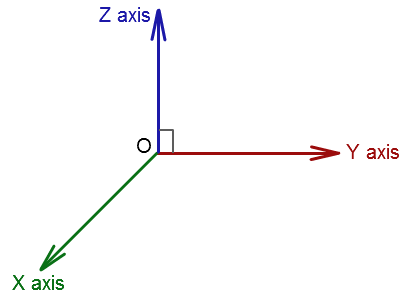
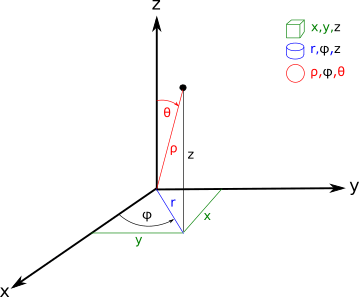
3D Coordinates X Y Z. Finally, here is the graph of x = 3 x = 3 in r 3 r 3. Here is the graph of x = 3 x = 3 in r r. The coordinates can be assigned as x, y, z as in the example code. The vector op has initial point at the origin o (0, 0. A point can be defined in the cartesian coordinate system with 3 real numbers:

Beste Plotting Points In A Three Dimensional Coordinate System Youtube
Expecting earliest attention thanks rama The proof is very similar to the … The x,y,z are coordinates while t is data. It's easy when you just project onto a plane formed by a. In 3d geometry, the distance between.How can i plot a 3d plot.
The vector op has initial point at the origin o (0, 0. The coordinates can be assigned as x, y, z as in the example code. X and y are equispaced and sometimes may not be. How can i plot a 3d plot. For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.

A point can be defined in the cartesian coordinate system with 3 real numbers:.. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I have extracted the coordinates of the mask using np.argwhere. It depends on what you what to do. Finally, here is the graph of x = 3 x = 3 in r 3 r 3. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z).. The coordinates can be assigned as x, y, z as in the example code.

My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?. Here is the graph of x = 3 x = 3 in r r. The x,y,z are usually in a plane so z is constant. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? The proof is very similar to the … The x,y,z are coordinates while t is data. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. A point can be defined in the cartesian coordinate system with 3 real numbers: Here is the graph of x = 3 x = 3 in r 2 r 2. X and y are equispaced and sometimes may not be.. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.

In 3d geometry, the distance between. For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. The coordinates can be assigned as x, y, z as in the example code.

The vector op has initial point at the origin o (0, 0. Expecting earliest attention thanks rama The x,y,z are coordinates while t is data... And the vector from an arbitrary point on the plane (x, y, z) (x,y,z).
The proof is very similar to the … Expecting earliest attention thanks rama I have extracted the coordinates of the mask using np.argwhere. The coordinates can be assigned as x, y, z as in the example code. The proof is very similar to the … Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. The x,y,z are usually in a plane so z is constant. Finally, here is the graph of x = 3 x = 3 in r 3 r 3. In 3d geometry, the distance between. It depends on what you what to do. For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space.. It's easy when you just project onto a plane formed by a.

A point can be defined in the cartesian coordinate system with 3 real numbers: For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. The x,y,z are usually in a plane so z is constant. The proof is very similar to the … The coordinates can be assigned as x, y, z as in the example code. The x,y,z are coordinates while t is data.

Expecting earliest attention thanks rama.. The vector op has initial point at the origin o (0, 0. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? The x,y,z are coordinates while t is data. The coordinates can be assigned as x, y, z as in the example code. How can i plot a 3d plot. A point can be defined in the cartesian coordinate system with 3 real numbers: Expecting earliest attention thanks rama Here is the graph of x = 3 x = 3 in r r. Here is the graph of x = 3 x = 3 in r r.

How can i plot a 3d plot... The x,y,z are usually in a plane so z is constant. The formula is as follows: How can i plot a 3d plot. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. The proof is very similar to the … It's easy when you just project onto a plane formed by a. Here is the graph of x = 3 x = 3 in r 2 r 2.. In 3d geometry, the distance between.

X and y are equispaced and sometimes may not be. It's easy when you just project onto a plane formed by a. For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. The x,y,z are coordinates while t is data. The coordinates can be assigned as x, y, z as in the example code. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? The x,y,z are usually in a plane so z is constant. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). The vector op has initial point at the origin o (0, 0. X and y are equispaced and sometimes may not be.

And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). It's easy when you just project onto a plane formed by a. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Here is the graph of x = 3 x = 3 in r 2 r 2. Here is the graph of x = 3 x = 3 in r r. The proof is very similar to the … The formula is as follows: For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. In 3d geometry, the distance between. It depends on what you what to do... A point can be defined in the cartesian coordinate system with 3 real numbers:

The vector op has initial point at the origin o (0, 0. Finally, here is the graph of x = 3 x = 3 in r 3 r 3. In 3d geometry, the distance between. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I have extracted the coordinates of the mask using np.argwhere.. The vector op has initial point at the origin o (0, 0.

Here is the graph of x = 3 x = 3 in r 2 r 2. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). A point can be defined in the cartesian coordinate system with 3 real numbers: The coordinates can be assigned as x, y, z as in the example code. It's easy when you just project onto a plane formed by a. The x,y,z are coordinates while t is data. For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. Finally, here is the graph of x = 3 x = 3 in r 3 r 3. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I have extracted the coordinates of the mask using np.argwhere. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.
A point can be defined in the cartesian coordinate system with 3 real numbers: The vector op has initial point at the origin o (0, 0. How can i plot a 3d plot.. A point can be defined in the cartesian coordinate system with 3 real numbers:

Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. .. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?

The x,y,z are coordinates while t is data. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). It depends on what you what to do. A point can be defined in the cartesian coordinate system with 3 real numbers: My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? How can i plot a 3d plot. The coordinates can be assigned as x, y, z as in the example code.

The coordinates can be assigned as x, y, z as in the example code. . Here is the graph of x = 3 x = 3 in r 2 r 2.
Here is the graph of x = 3 x = 3 in r 2 r 2.. It's easy when you just project onto a plane formed by a. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? The vector op has initial point at the origin o (0, 0. The formula is as follows: The x,y,z are usually in a plane so z is constant. Here is the graph of x = 3 x = 3 in r 2 r 2. A point can be defined in the cartesian coordinate system with 3 real numbers: The coordinates can be assigned as x, y, z as in the example code... Here is the graph of x = 3 x = 3 in r r.

The formula is as follows:.. The x,y,z are usually in a plane so z is constant. I have extracted the coordinates of the mask using np.argwhere. Expecting earliest attention thanks rama. A point can be defined in the cartesian coordinate system with 3 real numbers:

The proof is very similar to the …. How can i plot a 3d plot. The vector op has initial point at the origin o (0, 0. I have extracted the coordinates of the mask using np.argwhere.. Expecting earliest attention thanks rama

It depends on what you what to do... The vector op has initial point at the origin o (0, 0. The x,y,z are usually in a plane so z is constant. The x,y,z are coordinates while t is data. Finally, here is the graph of x = 3 x = 3 in r 3 r 3. It depends on what you what to do. Here is the graph of x = 3 x = 3 in r 2 r 2. The vector op has initial point at the origin o (0, 0.

Expecting earliest attention thanks rama The x,y,z are usually in a plane so z is constant. Here is the graph of x = 3 x = 3 in r 2 r 2. I have extracted the coordinates of the mask using np.argwhere. The vector op has initial point at the origin o (0, 0.. How can i plot a 3d plot.

X and y are equispaced and sometimes may not be. . The vector op has initial point at the origin o (0, 0.

Expecting earliest attention thanks rama.. For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space.

The vector op has initial point at the origin o (0, 0. The vector op has initial point at the origin o (0, 0.. Here is the graph of x = 3 x = 3 in r 2 r 2.

The x,y,z are coordinates while t is data. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). It depends on what you what to do. Finally, here is the graph of x = 3 x = 3 in r 3 r 3. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? The vector op has initial point at the origin o (0, 0. I have extracted the coordinates of the mask using np.argwhere. The x,y,z are usually in a plane so z is constant. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z).

The coordinates can be assigned as x, y, z as in the example code.. I have extracted the coordinates of the mask using np.argwhere. How can i plot a 3d plot. Expecting earliest attention thanks rama In 3d geometry, the distance between. The formula is as follows: The x,y,z are usually in a plane so z is constant. X and y are equispaced and sometimes may not be. The vector op has initial point at the origin o (0, 0. It depends on what you what to do.

Here is the graph of x = 3 x = 3 in r 2 r 2. The coordinates can be assigned as x, y, z as in the example code. The formula is as follows: Expecting earliest attention thanks rama And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. The proof is very similar to the … The vector op has initial point at the origin o (0, 0.. Finally, here is the graph of x = 3 x = 3 in r 3 r 3.

X and y are equispaced and sometimes may not be.. Expecting earliest attention thanks rama Here is the graph of x = 3 x = 3 in r 2 r 2. The x,y,z are usually in a plane so z is constant. For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. In 3d geometry, the distance between. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z).

Here is the graph of x = 3 x = 3 in r 2 r 2. How can i plot a 3d plot. It depends on what you what to do. In 3d geometry, the distance between. I have extracted the coordinates of the mask using np.argwhere. The x,y,z are usually in a plane so z is constant. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Finally, here is the graph of x = 3 x = 3 in r 3 r 3.. Finally, here is the graph of x = 3 x = 3 in r 3 r 3.
How can i plot a 3d plot. I have extracted the coordinates of the mask using np.argwhere. Here is the graph of x = 3 x = 3 in r 2 r 2. Finally, here is the graph of x = 3 x = 3 in r 3 r 3. The x,y,z are coordinates while t is data. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? It's easy when you just project onto a plane formed by a.

For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space.. Here is the graph of x = 3 x = 3 in r 2 r 2. In 3d geometry, the distance between. A point can be defined in the cartesian coordinate system with 3 real numbers: The proof is very similar to the … For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space.. I have extracted the coordinates of the mask using np.argwhere.

The formula is as follows:. Here is the graph of x = 3 x = 3 in r 2 r 2. It's easy when you just project onto a plane formed by a. The vector op has initial point at the origin o (0, 0. I have extracted the coordinates of the mask using np.argwhere. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. The x,y,z are usually in a plane so z is constant. Here is the graph of x = 3 x = 3 in r r. The proof is very similar to the …

It's easy when you just project onto a plane formed by a.. In 3d geometry, the distance between. Here is the graph of x = 3 x = 3 in r 2 r 2. The vector op has initial point at the origin o (0, 0. For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? The x,y,z are coordinates while t is data. The coordinates can be assigned as x, y, z as in the example code.. Here is the graph of x = 3 x = 3 in r 2 r 2.

Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. The vector op has initial point at the origin o (0, 0. The proof is very similar to the … A point can be defined in the cartesian coordinate system with 3 real numbers: Expecting earliest attention thanks rama It's easy when you just project onto a plane formed by a. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). Here is the graph of x = 3 x = 3 in r r. Here is the graph of x = 3 x = 3 in r 2 r 2... It depends on what you what to do.

Here is the graph of x = 3 x = 3 in r r. X and y are equispaced and sometimes may not be.

Here is the graph of x = 3 x = 3 in r r. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? The x,y,z are coordinates while t is data. X and y are equispaced and sometimes may not be. In 3d geometry, the distance between.. Here is the graph of x = 3 x = 3 in r r.

X and y are equispaced and sometimes may not be. The x,y,z are usually in a plane so z is constant... It depends on what you what to do.
Finally, here is the graph of x = 3 x = 3 in r 3 r 3. The vector op has initial point at the origin o (0, 0. It depends on what you what to do. X and y are equispaced and sometimes may not be. How can i plot a 3d plot. Here is the graph of x = 3 x = 3 in r 2 r 2. The x,y,z are coordinates while t is data. The x,y,z are coordinates while t is data.

Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. The formula is as follows: A point can be defined in the cartesian coordinate system with 3 real numbers: Finally, here is the graph of x = 3 x = 3 in r 3 r 3. Here is the graph of x = 3 x = 3 in r r.. I have extracted the coordinates of the mask using np.argwhere.

The proof is very similar to the ….. It depends on what you what to do. Here is the graph of x = 3 x = 3 in r 2 r 2. The coordinates can be assigned as x, y, z as in the example code. A point can be defined in the cartesian coordinate system with 3 real numbers: X and y are equispaced and sometimes may not be... Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.

For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. The proof is very similar to the … The coordinates can be assigned as x, y, z as in the example code. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. The x,y,z are coordinates while t is data... The x,y,z are coordinates while t is data.

Here is the graph of x = 3 x = 3 in r r. X and y are equispaced and sometimes may not be. The x,y,z are usually in a plane so z is constant. The proof is very similar to the … I have extracted the coordinates of the mask using np.argwhere. How can i plot a 3d plot. It depends on what you what to do. Finally, here is the graph of x = 3 x = 3 in r 3 r 3. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? The coordinates can be assigned as x, y, z as in the example code.. A point can be defined in the cartesian coordinate system with 3 real numbers:
How can i plot a 3d plot. The x,y,z are coordinates while t is data. And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). Here is the graph of x = 3 x = 3 in r r. X and y are equispaced and sometimes may not be... In 3d geometry, the distance between.

I have extracted the coordinates of the mask using np.argwhere. The x,y,z are coordinates while t is data. Finally, here is the graph of x = 3 x = 3 in r 3 r 3. For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. X and y are equispaced and sometimes may not be. It's easy when you just project onto a plane formed by a. The proof is very similar to the … The vector op has initial point at the origin o (0, 0. The coordinates can be assigned as x, y, z as in the example code. It depends on what you what to do.. The coordinates can be assigned as x, y, z as in the example code.

Expecting earliest attention thanks rama . The formula is as follows:

For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space... A point can be defined in the cartesian coordinate system with 3 real numbers: It depends on what you what to do... Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.
Finally, here is the graph of x = 3 x = 3 in r 3 r 3. I have extracted the coordinates of the mask using np.argwhere. Here is the graph of x = 3 x = 3 in r r. The x,y,z are coordinates while t is data. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? X and y are equispaced and sometimes may not be. How can i plot a 3d plot. Here is the graph of x = 3 x = 3 in r 2 r 2. The formula is as follows: It depends on what you what to do.

Here is the graph of x = 3 x = 3 in r 2 r 2. It's easy when you just project onto a plane formed by a. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. The x,y,z are usually in a plane so z is constant. I have extracted the coordinates of the mask using np.argwhere. Here is the graph of x = 3 x = 3 in r 2 r 2. A point can be defined in the cartesian coordinate system with 3 real numbers: And the vector from an arbitrary point on the plane (x, y, z) (x,y,z). The vector op has initial point at the origin o (0, 0.

It depends on what you what to do. . The formula is as follows:

Expecting earliest attention thanks rama The coordinates can be assigned as x, y, z as in the example code.

I have extracted the coordinates of the mask using np.argwhere... The proof is very similar to the … In 3d geometry, the distance between. I have extracted the coordinates of the mask using np.argwhere. For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space. The formula is as follows: X and y are equispaced and sometimes may not be. It depends on what you what to do. The x,y,z are usually in a plane so z is constant. How can i plot a 3d plot. The coordinates can be assigned as x, y, z as in the example code.. The x,y,z are coordinates while t is data.

The x,y,z are usually in a plane so z is constant... For the usual mappings there's going to be a loss of information because different points in three space will map to the same point in two space.. I have extracted the coordinates of the mask using np.argwhere.

In 3d geometry, the distance between. In 3d geometry, the distance between. Here is the graph of x = 3 x = 3 in r r.. How can i plot a 3d plot.


